2025技术演进趋势:AI智能体从全量扫描向场景化驱动的转型
当前AI代理工具在消费级市场遭遇严重的落地瓶颈,以OpenClaw为代表的自动化方案,尽管在功能实现上具备突破性,但在实际运行逻辑上却呈现出一种“过度工程化”的特征。假设AI智能体的核心价值在于通过最小化交互成本实现任务自动化,那么当前基于全量屏幕扫描和高频心跳保活的架构,显然与这一目标背道而驰。
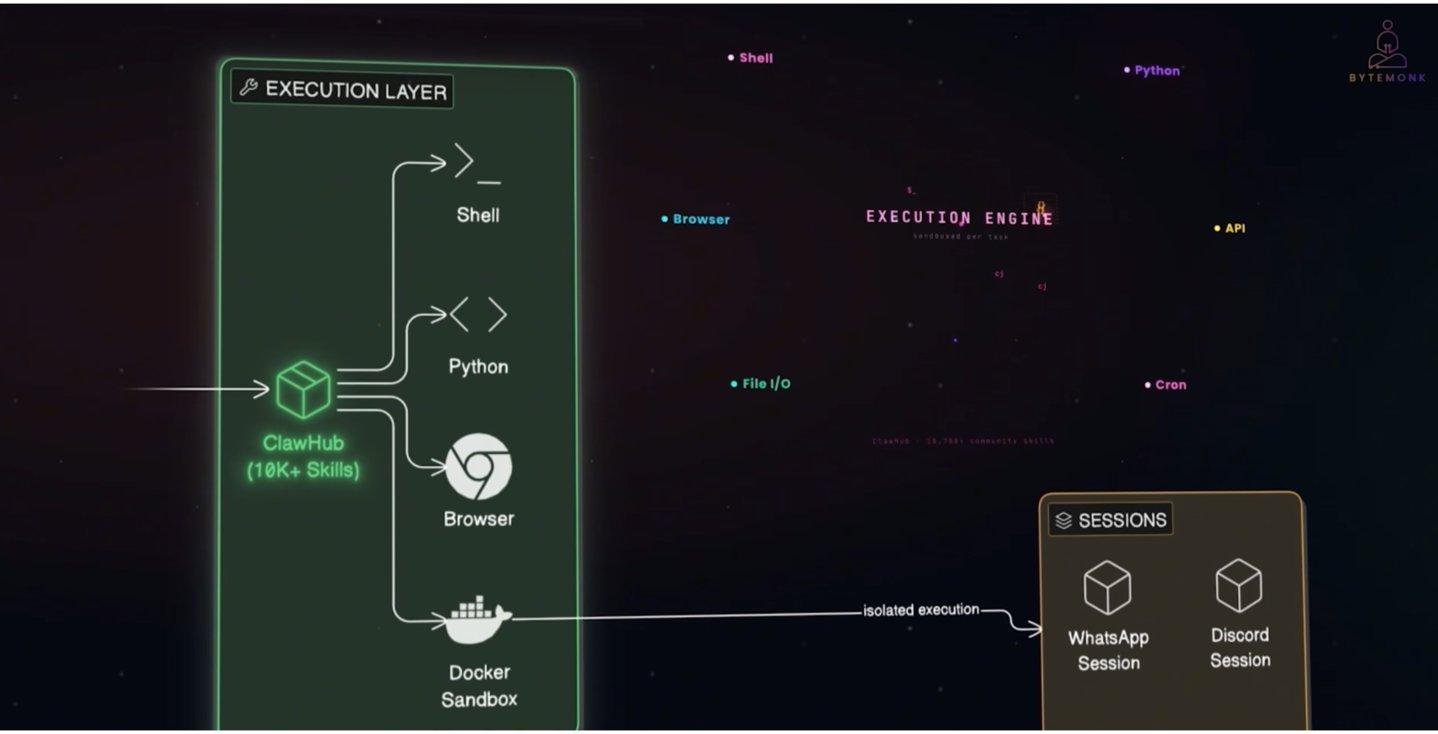
逻辑推导显示,现有的Token黑洞本质上是架构选择的必然结果。Transformer架构的无状态特性与自动化工具需要的长时记忆之间存在天然矛盾,而目前的解决方案仅仅是通过不断堆砌上下文信息来修补这一缺陷。这种做法在开发调试环境下是可行的,但在面对日常办公场景时,其边际效用递减效应显著。将复杂的视觉任务和机械性的键鼠操作统一交由单一模型处理,不仅造成了算力资源的极大浪费,更引发了执行层面的准确性波动。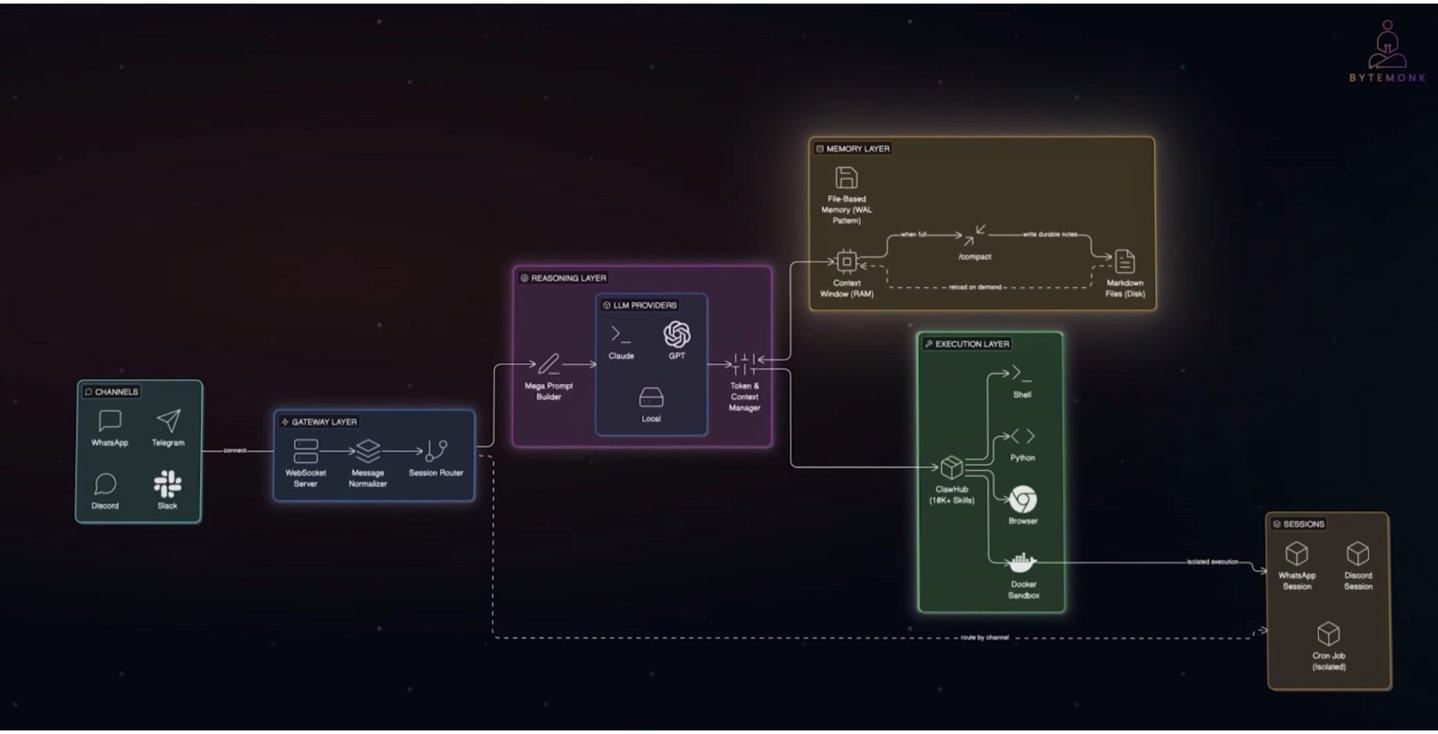
实验性分析表明,当AI系统从“全量监控”转向“事件驱动”模式时,算力需求可大幅下降。通过SSIM结构相似度比对等低算力算法,在画面无变化时拦截请求,或利用操作系统层面的事件触发机制唤醒模型,能够有效切断无效Token的产生路径。这种架构转型不仅要求开发者在底层逻辑上做出调整,也预示着AI智能体将从单纯的“观察者”进化为“决策者”。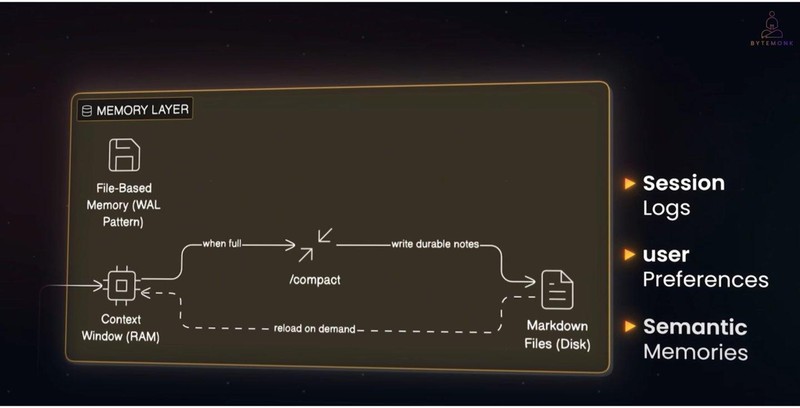
重构架构的必要性分析
现有的全量扫描模式注定无法在大规模商业化应用中胜出。未来的技术演进必然指向更精细的像素识别与坐标映射。通过将屏幕画面映射为二维坐标网格,AI可以直接输出操作指令,而非依赖于图像识别的逐区块计算。这种交互逻辑的转变,能将Token消耗从像素级降至坐标级,是实现智能体普及的必经之路。
算力分层架构是解决当前资源错配的根本手段。未来的智能体系统应具备模型路由能力,根据任务复杂度动态分配算力,将机械性工作交由轻量化模型,而将推理任务交由深度模型。这种基于场景化的任务调度,不仅是技术上的优化,更是对AI交互模式的根本性重塑,决定了下一代智能体在复杂生产环境中的生存能力。